Ensuring Reliable Ground Truth for Safe Autonomous Driving
The future of autonomous systems depends on reliable human feedback that guides, validates, and aligns machine behavior with human expectations. As autonomous vehicle manufacturers scale their perception systems, they face a critical challenge: models must not only avoid collisions but behave in ways that feel safe and align with human judgment—values that cannot be derived from sensor data alone.
At Kognic, we solve one of the most critical bottlenecks in autonomy: access to cost-efficient, reliable, and scalable human feedback for multi-modal sensor-fusion data. Our mission is straightforward: help customers get the most annotated autonomy data for their budget.
The challenge is clear: as datasets grow exponentially, annotation must become more productive without compromising quality. Through our unique combination of Platform, Process, and People, we've engineered solutions that maximize the value of every hour of human judgment:
- Advanced automation and co-pilot tools that minimize manual effort
- Robust quality assurance processes that catch errors before delivery
This makes Kognic the price leader in sensor-fusion annotation—enabling our customers to integrate scalable, cost-efficient human feedback into their data pipelines.
How does this work in practice?
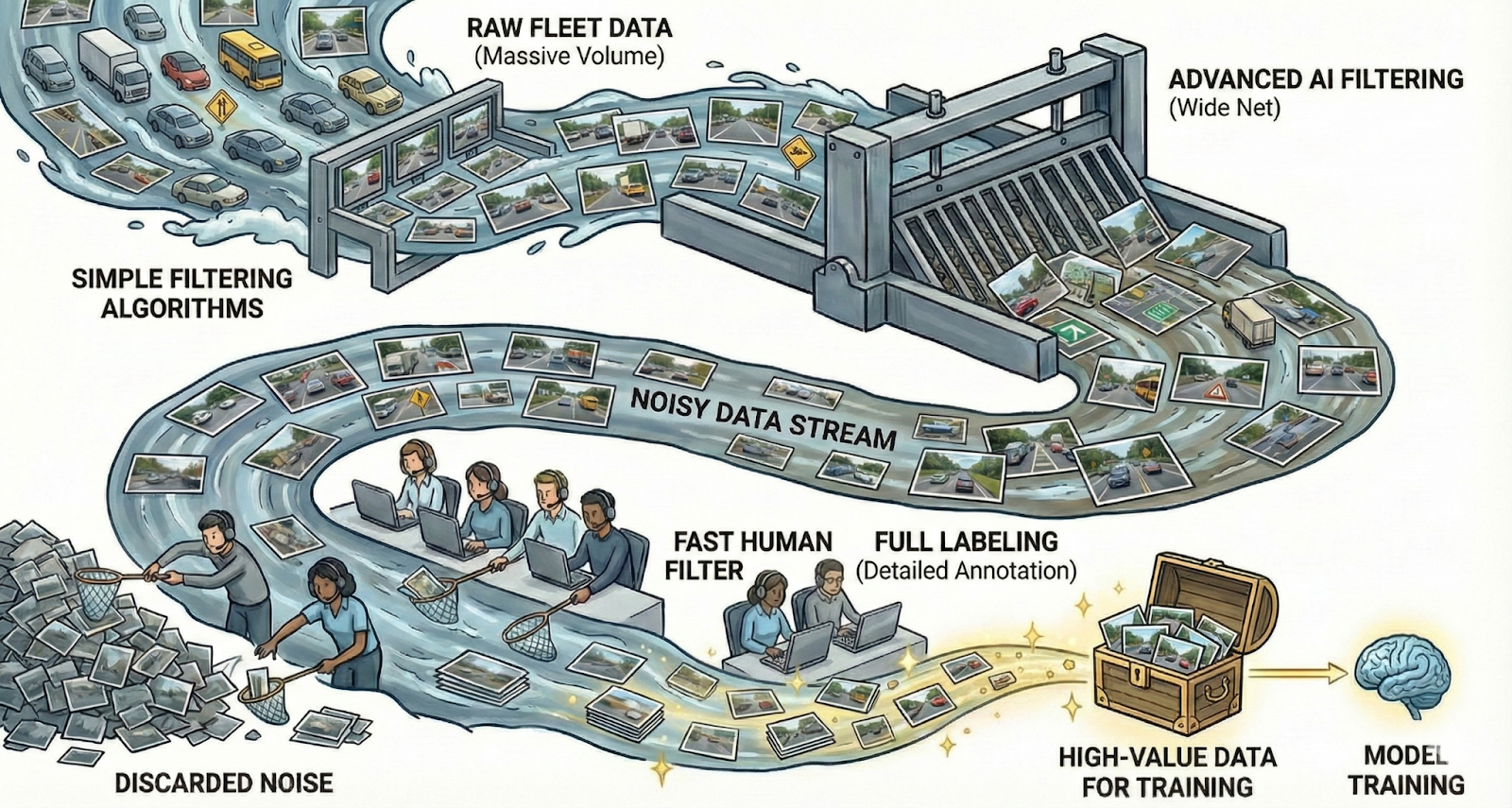
Productivity gains come from two fundamental innovations: intelligent tools that accelerate annotation, and sophisticated quality processes that ensure reliability. Our platform routes human attention precisely where it matters most—reviewing model predictions, validating edge cases, and providing judgment on ambiguous scenarios.
Consider a real-world scenario: annotating thousands of sensor-fusion frames to train an object detection algorithm. Each frame in our platform is processed through automated co-pilot workflows that leverage model predictions as a starting point. Human annotators verify and refine only where needed, dramatically reducing manual effort while maintaining the high-quality ground truth required for safety-critical applications.
Our approach addresses multiple potential failure modes:
- Annotation accuracy through expert-guided workflows
- Consistency through standardized processes and clear guidelines
- Quality gaps through multi-stage verification
- Scalability through optimized task allocation and automation
This systematic approach enables us to deliver reliable ground truth that stands up to the most demanding safety cases. It's why we've developed comprehensive annotator training programs and established our Guideline Agreement Process—ensuring perfect alignment between Kognic, clients, and annotation teams on quality standards.
Our productivity-first methodology extends throughout our platform. It's visible in our advanced quality assurance process and our continuous investment in automation tools that maximize the value of human feedback.
Ready to accelerate your autonomous system development? Connect with our team to learn how Kognic can help you get the most annotated autonomy data for your budget—combining productivity, quality, and scale to support your path to safe autonomy.
Share this
Written by