At Kognic, we help teams integrate scalable, cost-efficient human feedback into their data pipelines—enabling them to train and validate autonomous systems faster. Our CEO Daniel Langkilde recently spoke at AutoAI in Berlin to explain our data-driven approach and iterative way of working.
Continue reading to discover how Kognic delivers the most annotated autonomy data for your budget.
The Challenge: Balancing Speed, Safety, and Global Coverage
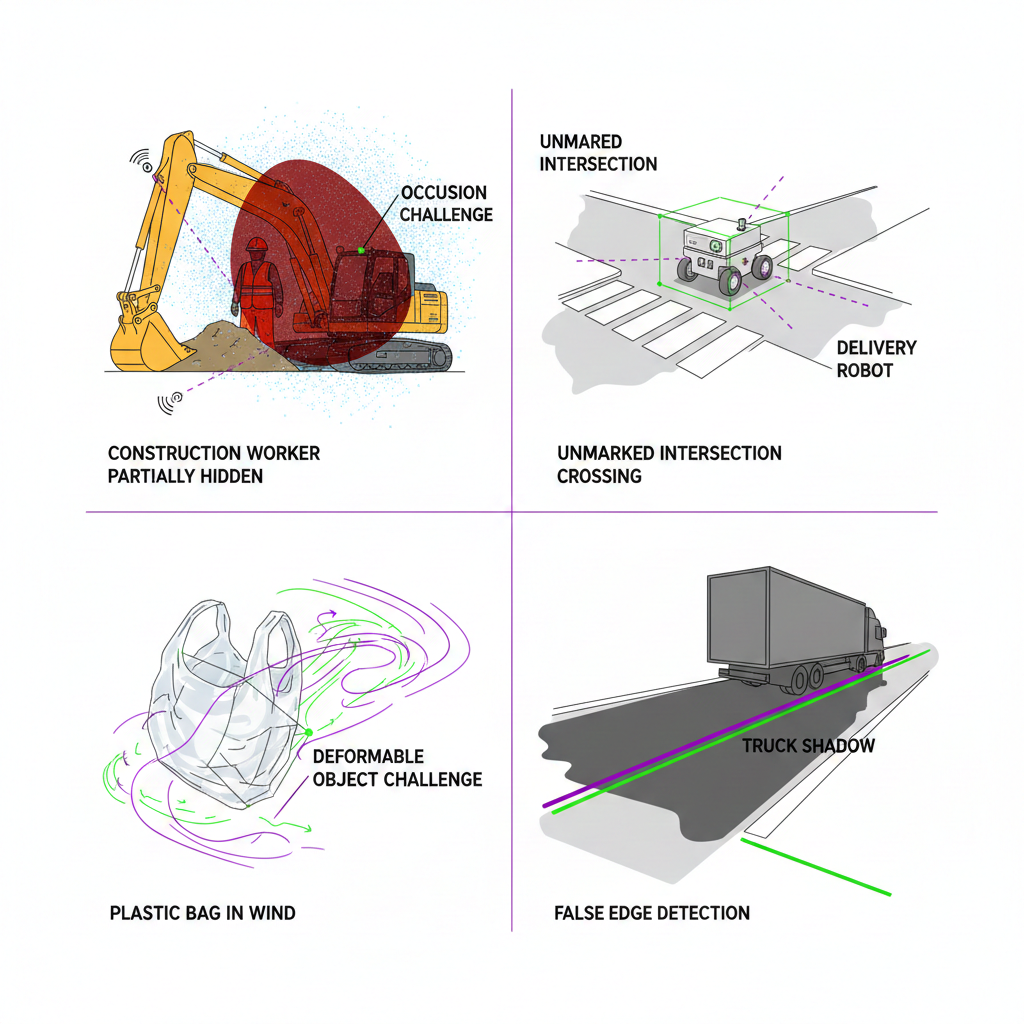
Developing perception systems for autonomous vehicles requires managing massive amounts of multi-modal sensor data. The challenge isn't just technical—it's about defining safe behavior across millions of edge cases while achieving global coverage. A system that works in Phoenix, Arizona needs to work safely everywhere.
Success requires three capabilities working together: perception, prediction, and planning. Perception transforms raw sensor data into a structured understanding of the world. Prediction interprets the intent of objects and actors. Planning determines the vehicle's path based on both.
The key challenge? You need to progress quickly and iterate, while enabling constant monitoring and measurement. This requires sophisticated tooling that lets engineering teams move fast without compromising safety or accuracy.
Our Approach: High Engineering Velocity Through Better Tooling
At Kognic, we believe the answer isn't better planning—it's testing faster and learning faster. This requires balancing three constraints:
Safety remains a hard constraint due to regulatory, ethical, and product requirements.
Performance must be sufficient for your use case and operating domain.
Value comes from delivering a product that customers trust and regulators approve.
The solution is high engineering velocity enabled by productive tooling. Teams need platforms that help them move faster, iterate quicker, learn more—all while measuring progress accurately. That's why Kognic provides the most productive annotation platform for autonomy data.
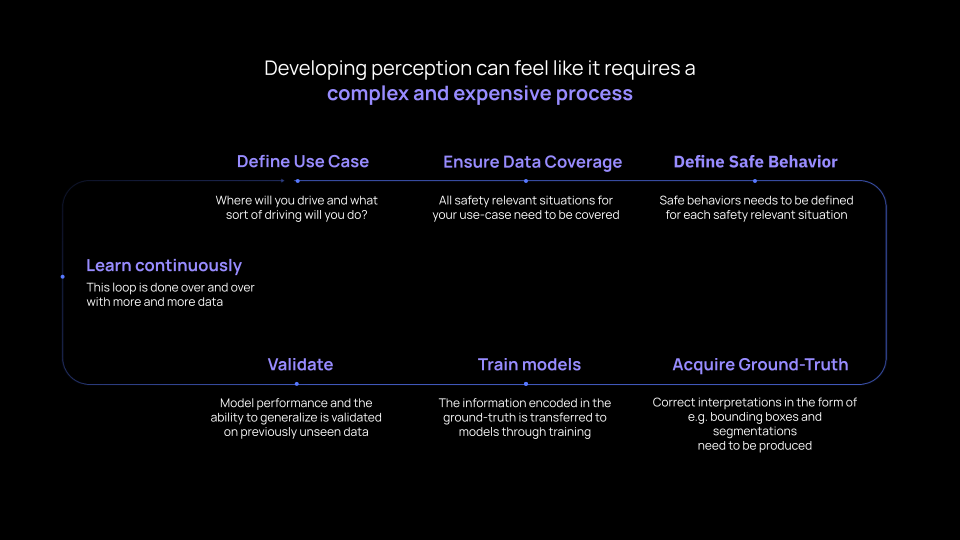
Measure First, Then Define Your Domain
Rather than specifying upfront what a vehicle must do, we recommend starting with measurement. Track your KPIs continuously and understand your Operational Design Domain (ODD) as you progress. This requires detailed statistics and constant monitoring
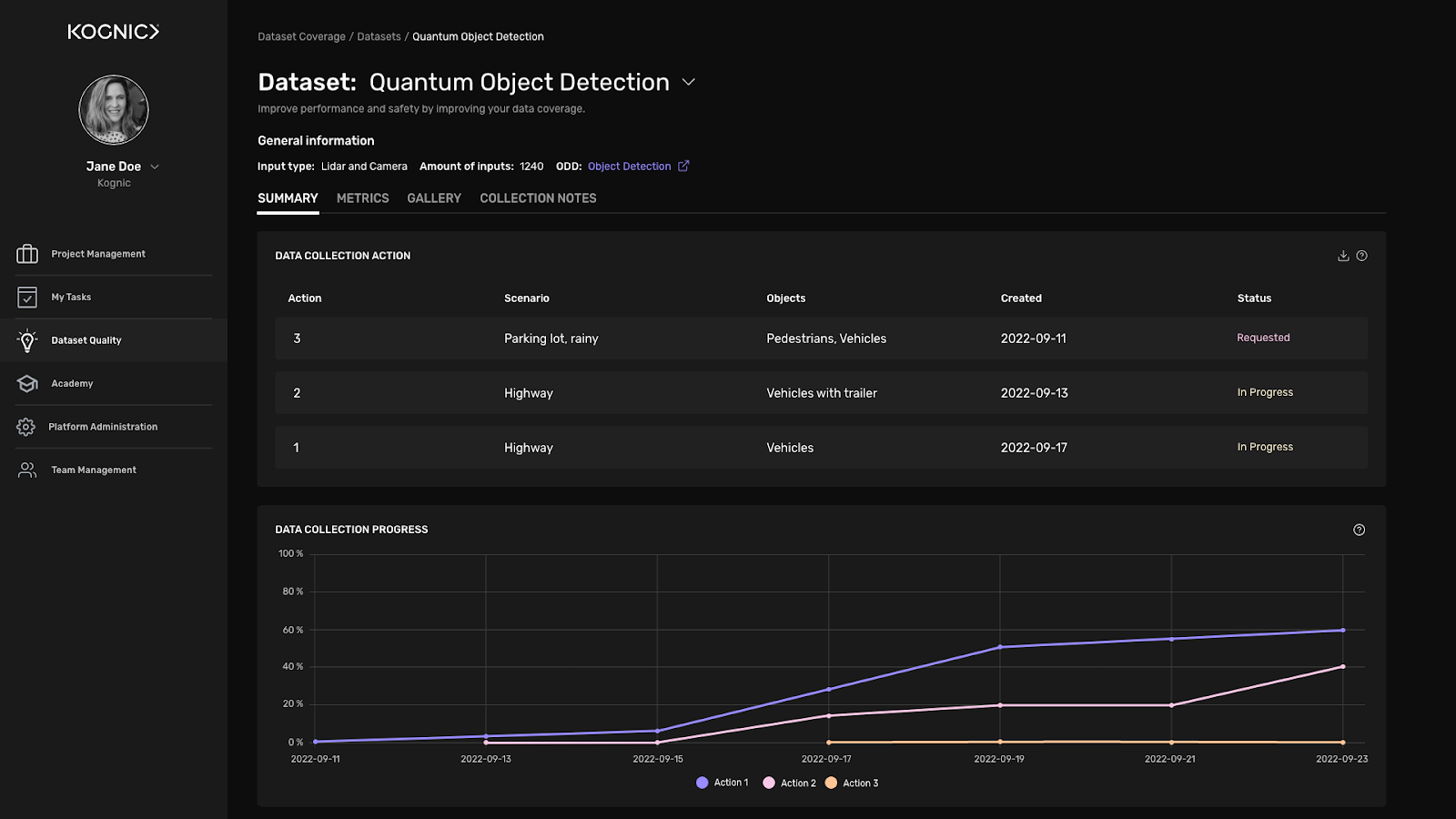
The key is tracking performance and ODD coverage simultaneously. Every time you expand your ODD, you need to verify that your perception KPIs remain valid with sufficient statistical significance.
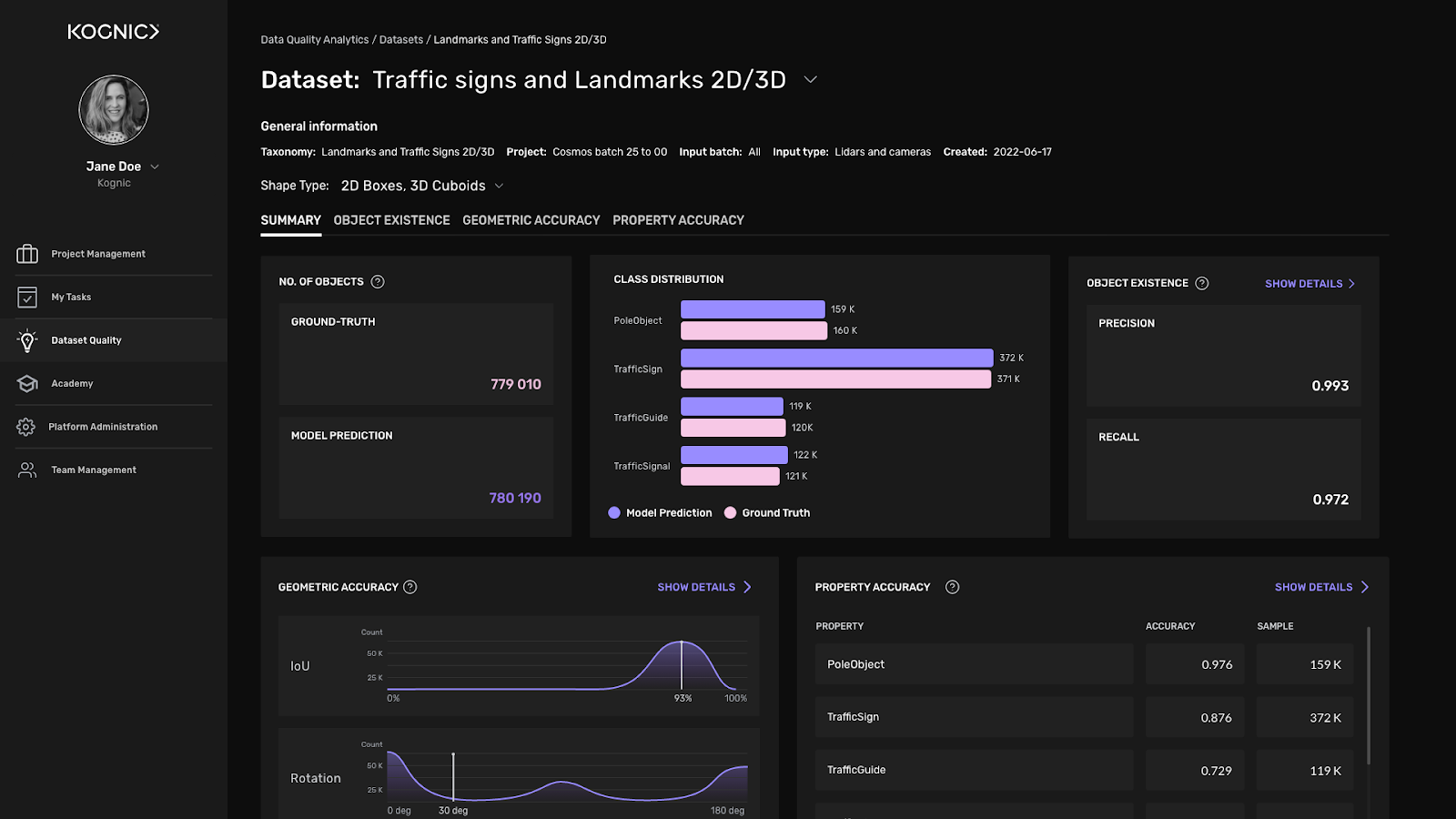
This iterative approach requires reliable ground truth. As we say at Kognic: calling it ground truth doesn't actually make it true. Your annotations are samples from a probability distribution with inherent variance. To maximize reliability, you need to minimize variance and maximize alignment with your performance goals.
Performance measurement must be localized to what matters. You don't need centimeter-level accuracy for distant objects—you need it when proximity and safety are critical. Success comes from measuring performance in context, understanding your ODD, and iterating based on what you learn rather than what you planned.
Get the Most Annotated Data for Your Budget
The overarching question is: what data do you need? At Kognic, we believe you should explore, learn, measure, and look for what's necessary for your product. Then iterate—fast.
This requires the right tooling. With Kognic's Perception Analytics and Ground Truth Platform, engineering teams get the most annotated autonomy data for their budget. Our unique combination of Platform, Process, and People makes us the price leader in autonomy data annotation.
We're helping the most ambitious companies across the automotive industry develop safe perception systems—with vision you can trust.